|


This page covers up to my postdoctoral research. You can find my work after 2021 at my lab homepage: NeuMove.
The goal of my research is to better understand and model the motor control and biomechanics of human locomotion and to apply the obtained knowledge to rehabilitation engineering. I develop computational models and conduct human experiments to propose and evaluate control hypotheses. I envision to bring about simulation testbeds (which I call digital motor clones) for developing rehabilitation treatment.
Journal papers

|
Optimized hip-knee-ankle exoskeleton assistance reduces the metabolic cost of walking with worn loads GM Bryan, PW Franks, S Song, R Reyes, MP O'Donovan, KN Gregorczyk & SH Collins Journal of NeuroEngineering and Rehabilitation, 2021 [paper] |

|
Optimized hip-knee-ankle exoskeleton assistance at a range of walking speeds GM Bryan, PW Franks, S Song, AS Voloshina, R Reyes, MP O'Donovan, KN Gregorczyk & SH Collins Journal of NeuroEngineering and Rehabilitation, 2021 [paper] |
|
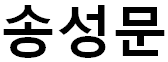
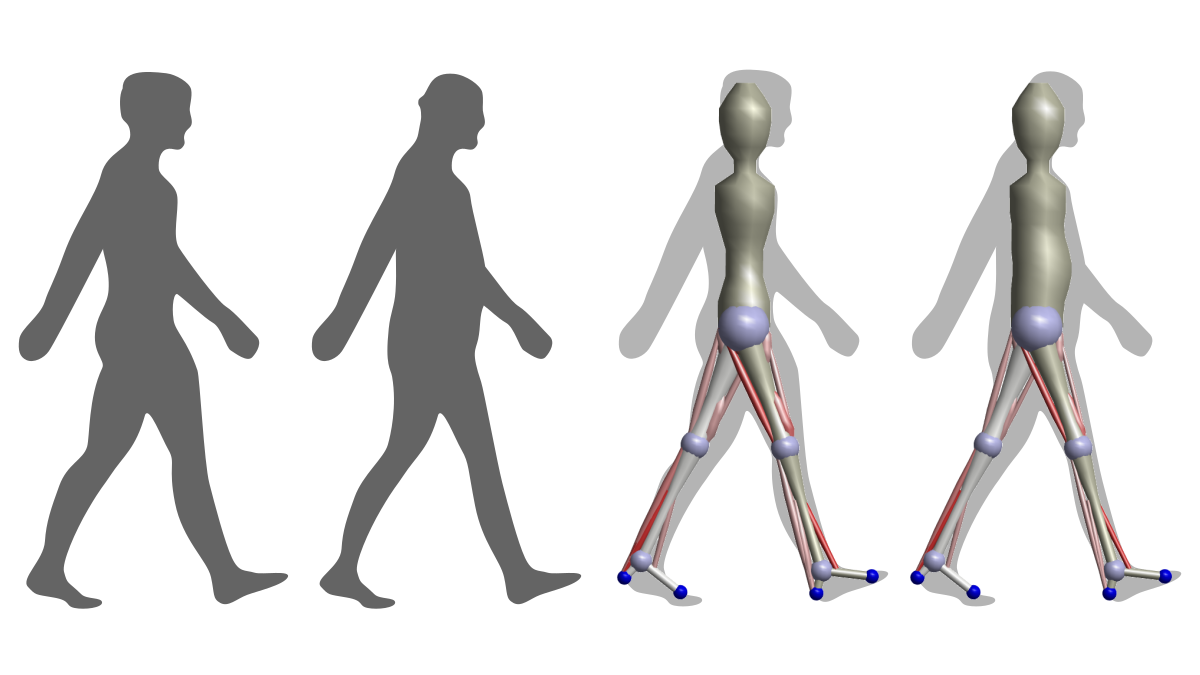
Deep reinforcement learning for modeling human locomotion in neuromechanical simulation S Song, Ł Kidziński, XB Peng, C Ong, J Hicks, S Levine, CG Atkeson & SL Delp Journal of NeuroEngineering and Rehabilitation, 2021 [paper] [video 2017] [video 2018] [video 2019] |
|
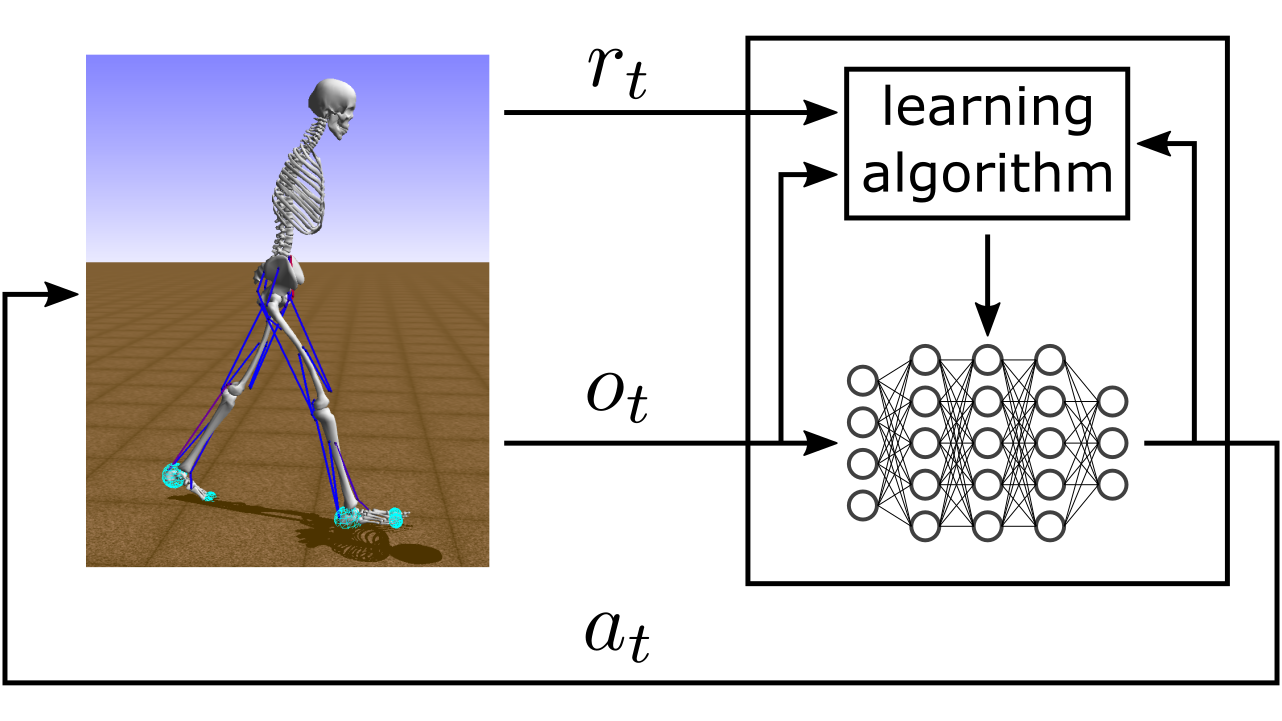
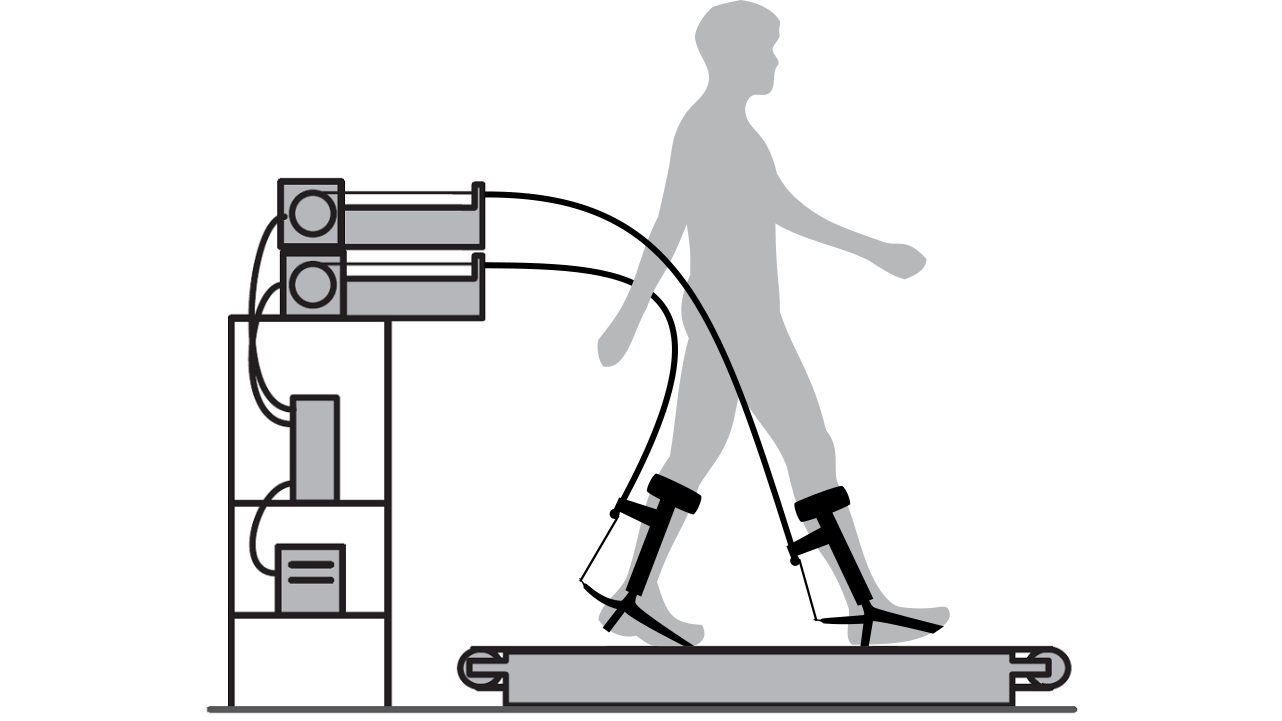
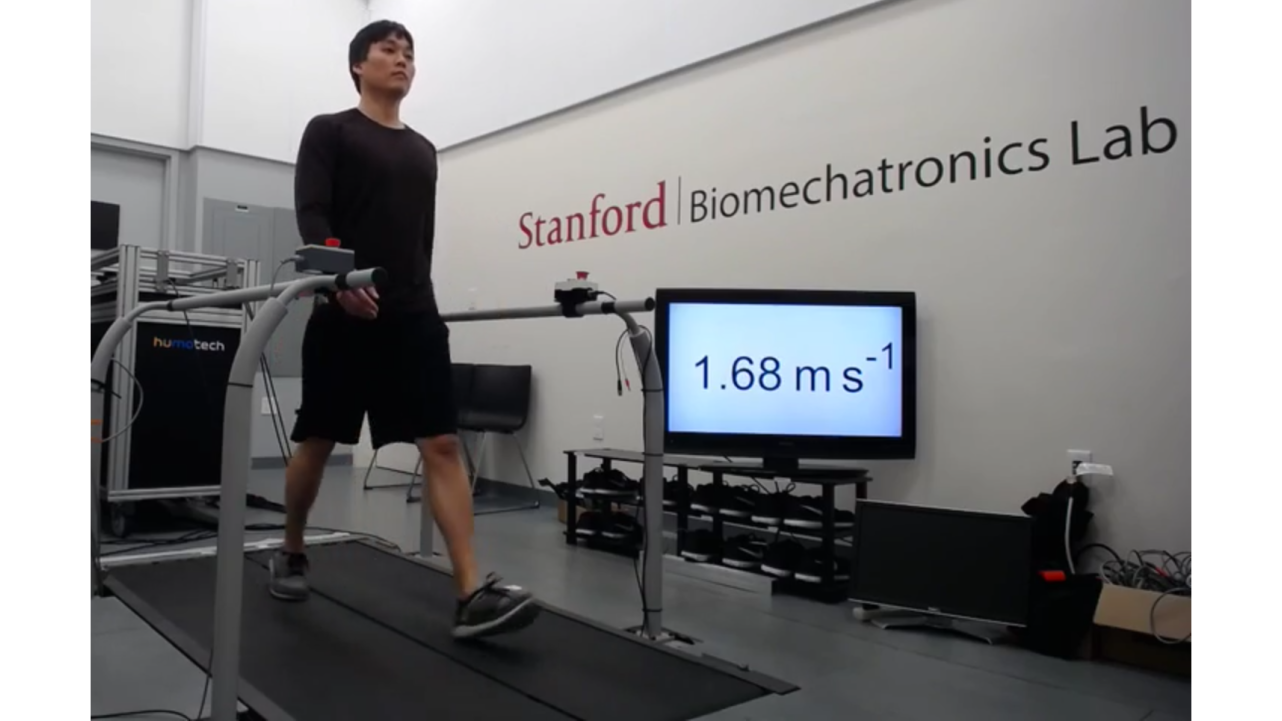
Optimizing exoskeleton assistance for faster self-selected walking S Song & SH Collins IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2021 [paper] [video 1] [video 2] [video Stanford] [press] |
|
Using force data to self-pace an instrumented treadmill and measure self-selected walking speed S Song, H Choi & SH Collins Journal of NeuroEngineering and Rehabilitation, 2020 [paper] [code] [video] |
|
Predictive neuromechanical simulations indicate why walking performance declines with aging S Song & H Geyer The Journal of Physiology, 2018 [paper] [press] |
|
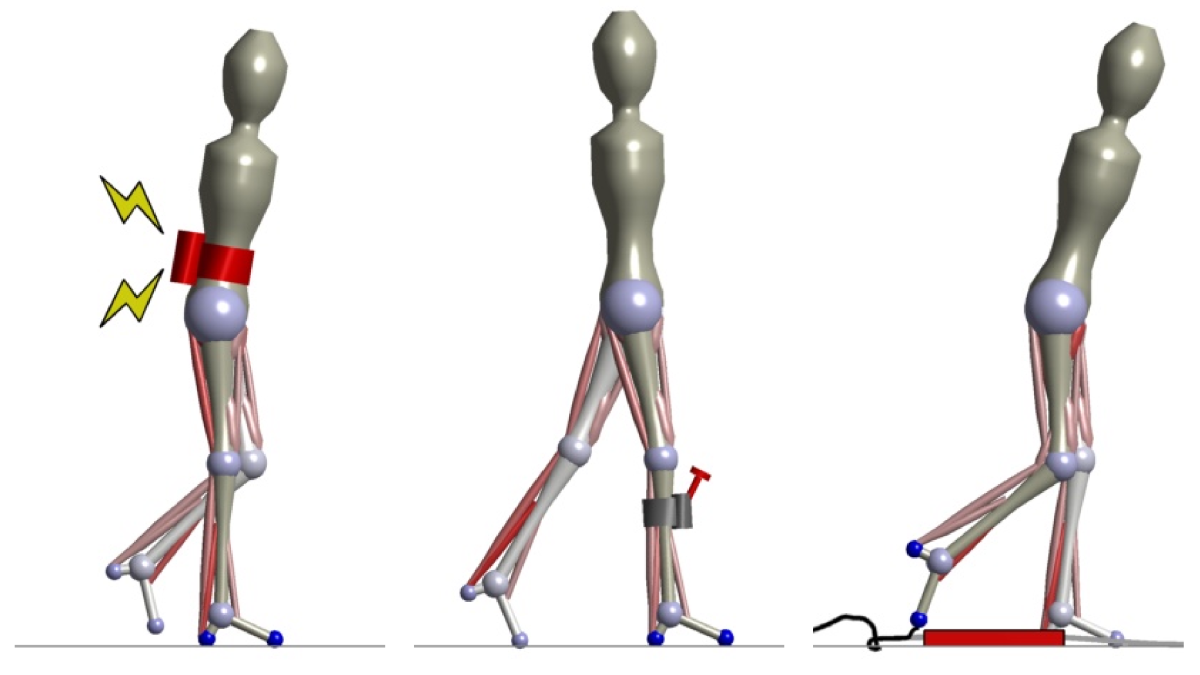
Evaluation of a Neuromechanical Walking Control Model Using Disturbance Experiments S Song & H Geyer Frontiers in Computational Neuroscience, 2017 [paper] [video 1] [video 2] |
|
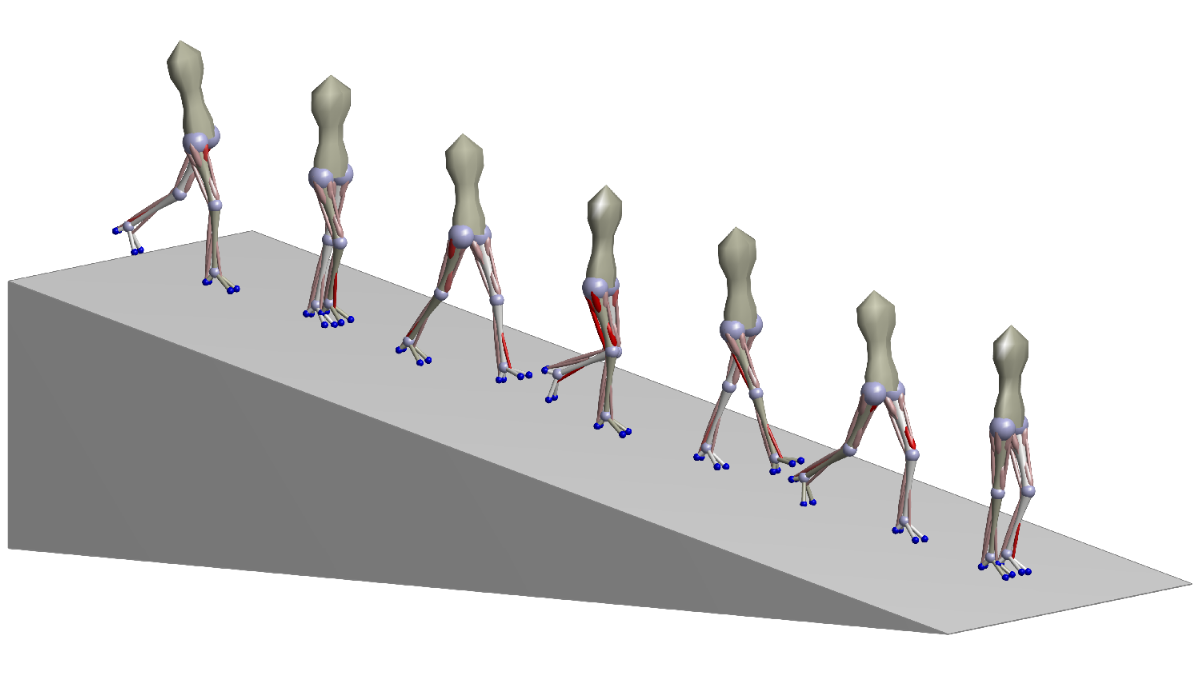
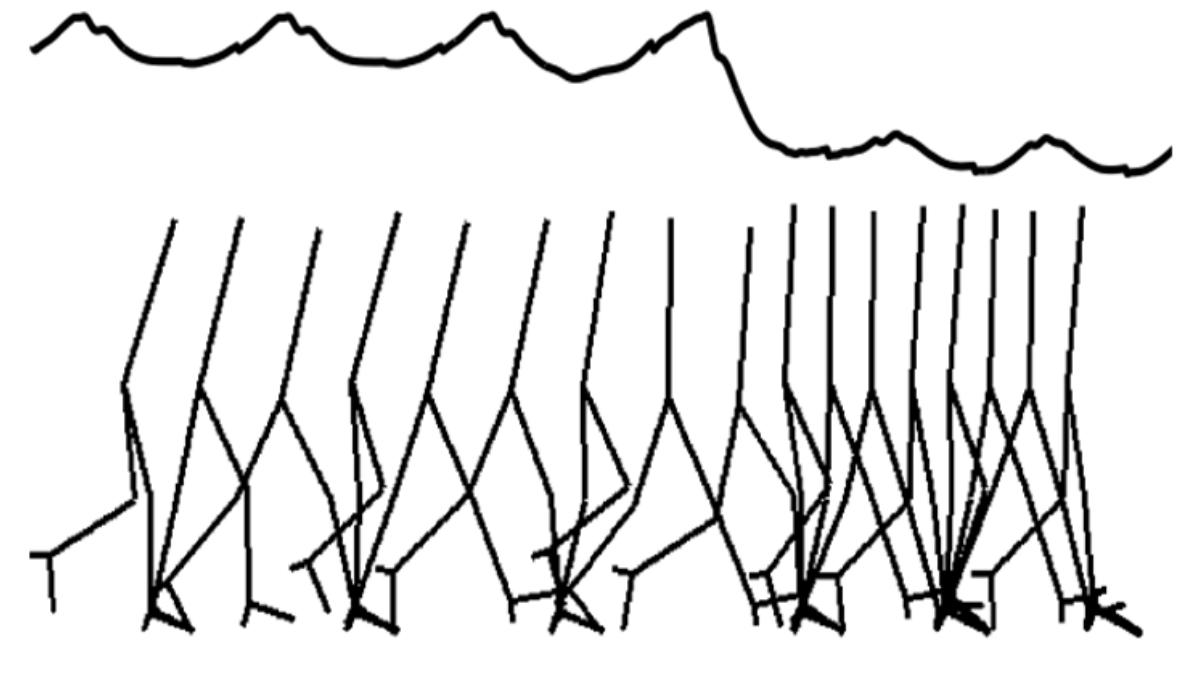
A neural circuitry that emphasizes spinal feedback generates diverse behaviours of human locomotion S Song & H Geyer The Journal of Physiology, 2015 [paper] [video] [model] [journal cover] |
Conference papers

|
Bayesian optimization using domain knowledge on the ATRIAS biped A Rai, R Antonova, S Song, W Martin, H Geyer & CG Atkeson IEEE ICRA, 2018 [paper] [video] |
|
Towards a hierarchical neuromuscular control model with reflex-based spinal control
- A study with a simple running model S Song International Symposium on Advanced Intelligent Systems, 2015 [paper] [video] [best presentation award] |
|
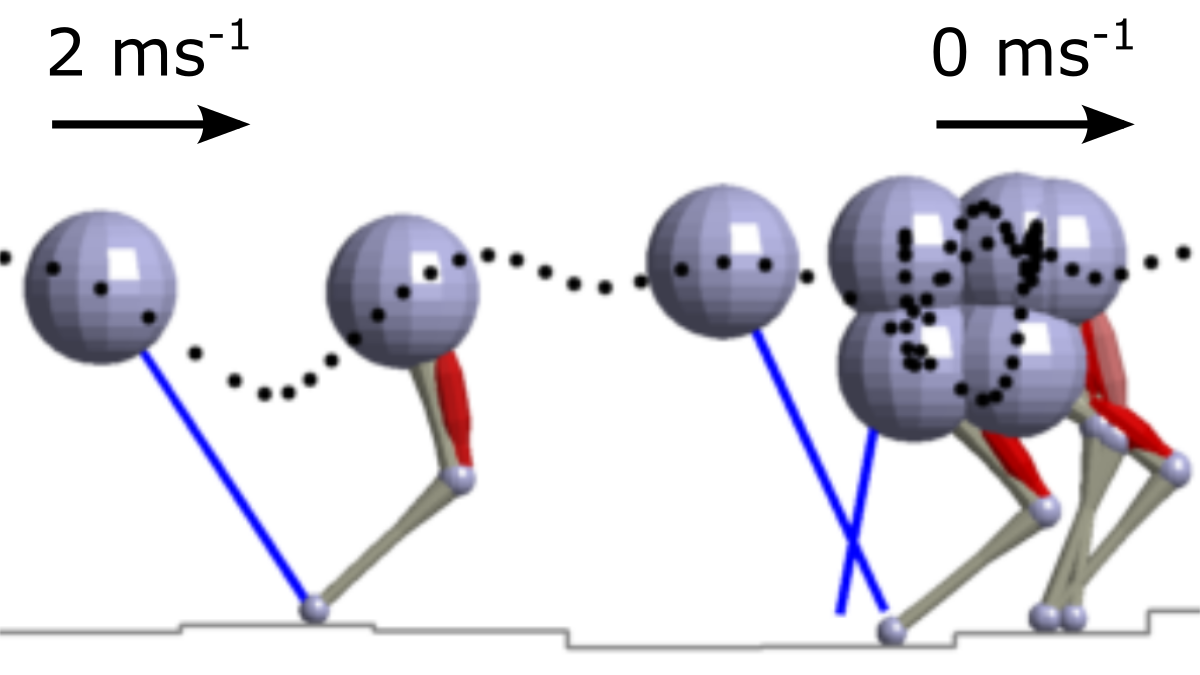
Regulating speed in a neuromuscular human running model S Song & Hartmut Geyer IEEE Humanoids, 2015 [paper] [video] |
|
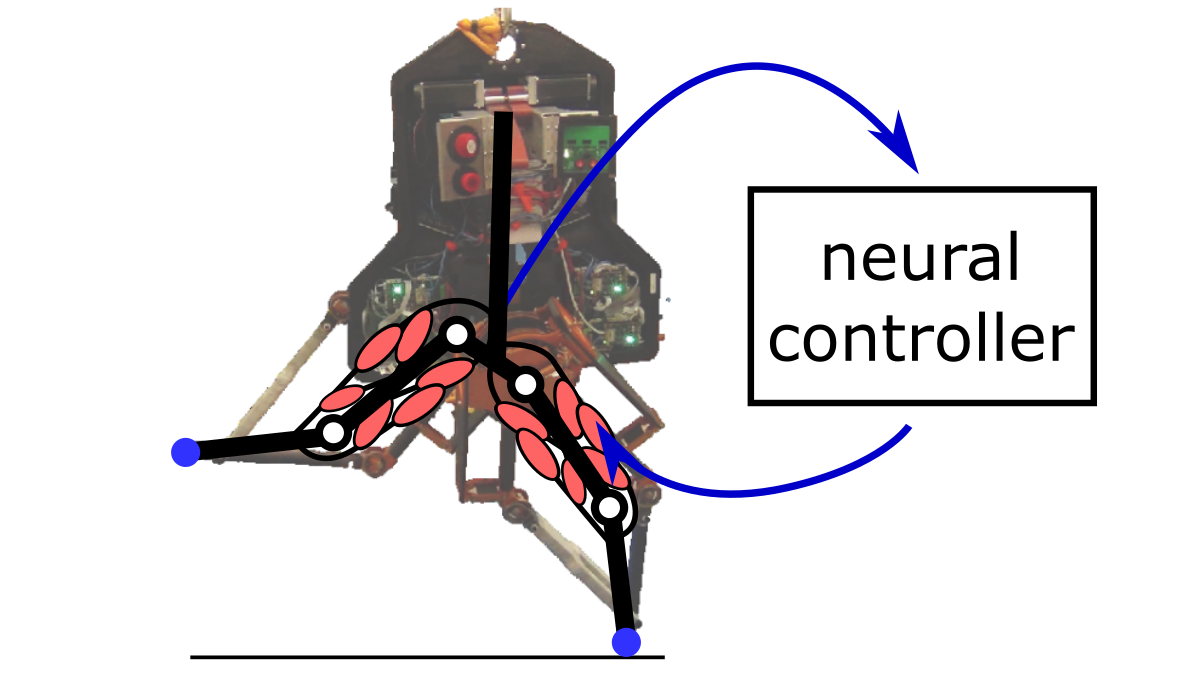
Toward a virtual neuromuscular control for robust walking in bipedal robots Z Batts, S Song & Hartmut Geyer IEEE IROS, 2015 [paper] [video] |
|
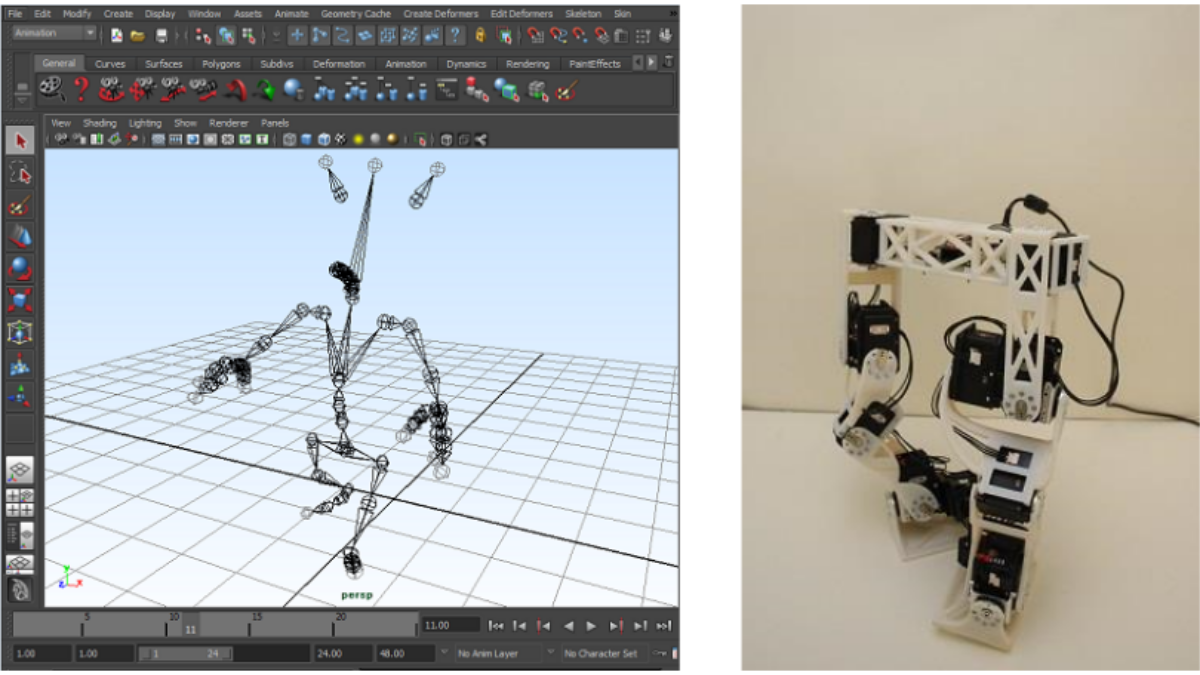
Development of a bipedal robot that walks like an animation character S Song, J Kim & K Yamane IEEE ICRA, 2015 [paper] [video] [talk] [press] |
|
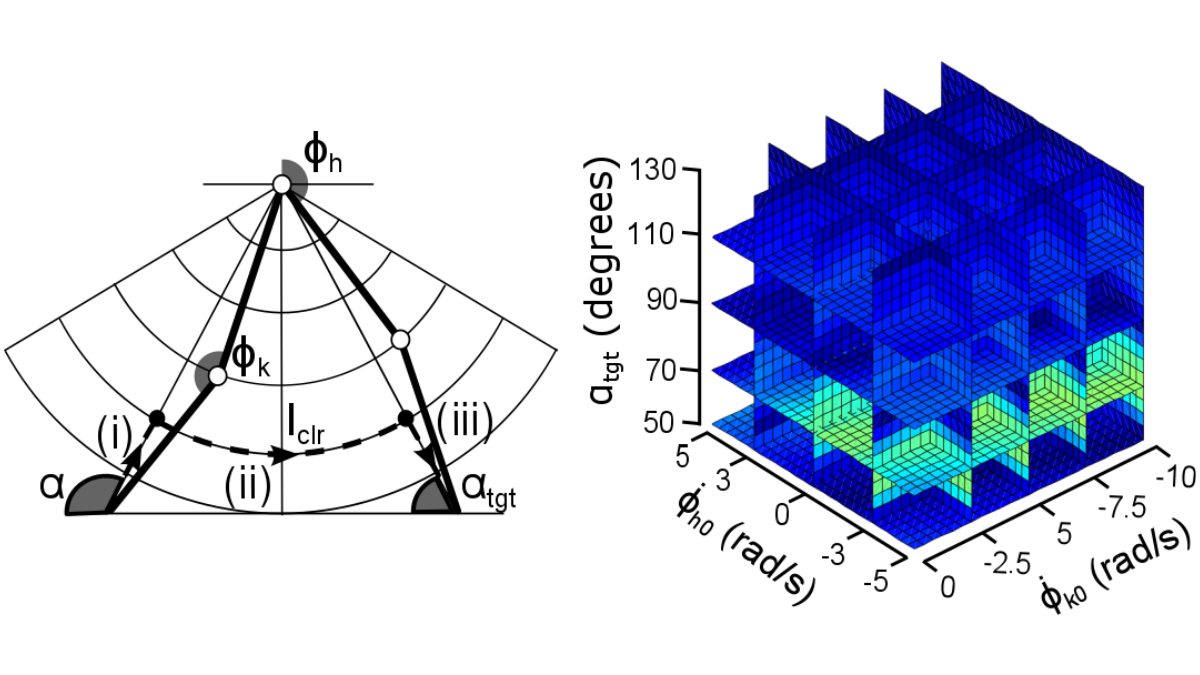
Integration of an adaptive swing control into a neuromuscular human walking model S Song, R Desai & H Geyer IEEE EMBC, 2013 [paper] [video] |
|
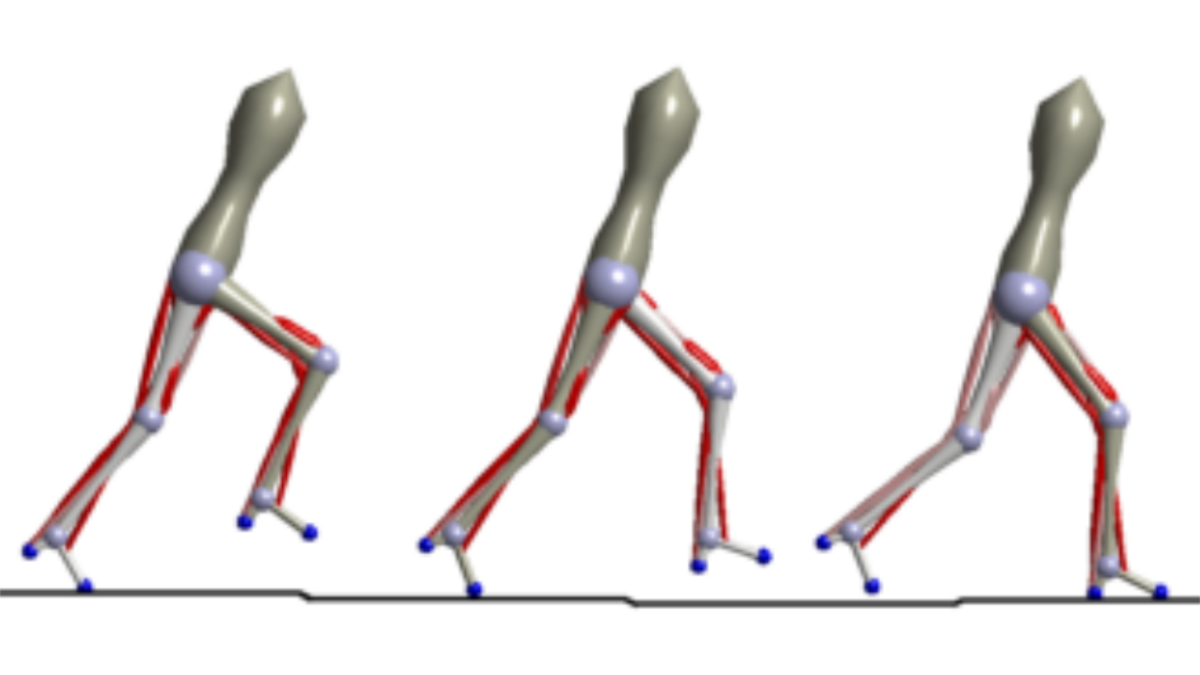
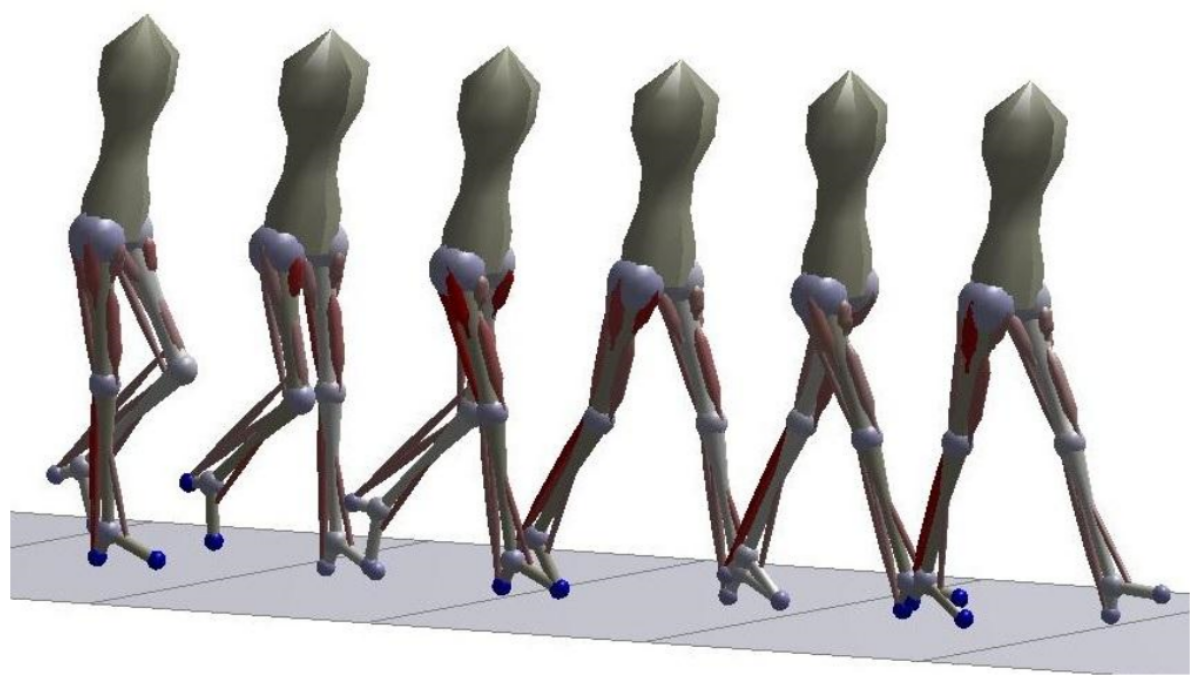
Generalization of a muscle-reflex control model to 3D walking S Song & H Geyer IEEE EMBC, 2013 [paper] |

|
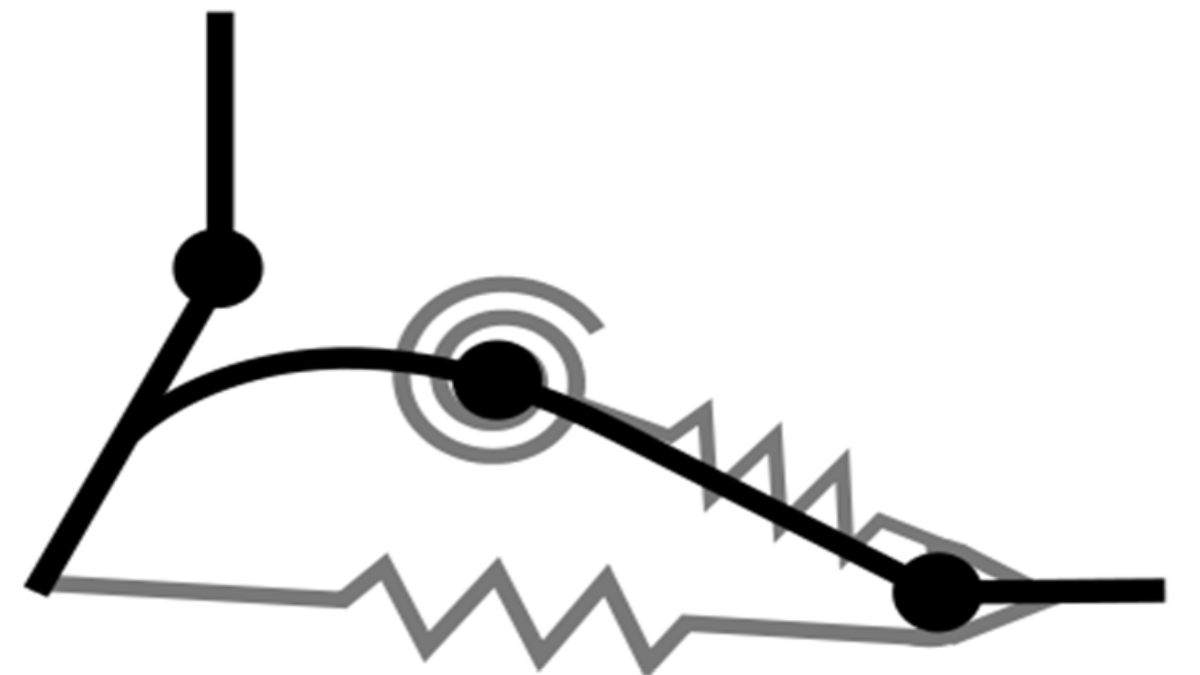
The effect of foot compliance encoded in the windlass mechanism on the energetics of human walking S Song, C LaMontagna, SH Collins & H Geyer IEEE EMBC, 2013 [paper] [video] [project page] |
|
Regulating speed and generating large speed transitions in a neuromuscular human walking model S Song & H Geyer IEEE ICRA, 2012 [paper] [video] [slides] |
|
The energetic cost of adaptive feet in walking S Song & H Geyer IEEE ROBIO, 2011 [paper] [slides] [project page] |
|
Development of an omnidirectional walking engine for full-sized lightweight humanoid robots S Song, YJ Ryoo & DW Hong ASME IDETC, 2011 [paper] [video1] [video2] [slides] [project page] |
|
Linear-time encodable rate-compatible punctured LDPC codes with low error floors S Song, D Hwang, S Seo & J Ha IEEE VTC, 2008 [paper] |
Patents
J Kim, K Yamane & S Song, Method for developing and controlling a robot to have movements match-ing an animation character, United States Patent 9427868, 2016.
[link]
J Nam, J An, D Hwang, J Ha & S Song, Apparatus and method for encoding low density parity check code, Korean patent 10-0999272-00-00, 2010.
[link]